Difference between revisions of "Rotate PH20 Head to New Angles"
From ArcoWiki
(Created page with "To '''Rotate the PH20 Head''' to a new Position there are two methods: * By ARCO user interface * By DMIS command == ARCO User Interface == * Set the CMM to CNC...") |
|||
| Line 10: | Line 10: | ||
* Make sure the CAD Window is selected | * Make sure the CAD Window is selected | ||
* Open the Menu | * Open the Menu | ||
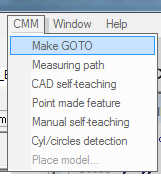
| − | '''CMM -> Make GOTO''' | + | '''CMM -> Make GOTO''' [[File:PH20_2.png]] or [[File:PH20_3.png]] |
| − | * Check the label for A and B angle in the [[PH20]] Frame | + | * Check the label for A and B angle in the [[PH20]] Frame [[File:PH20_1.png]] |
* Fill the text box with the angles to be reached by the head | * Fill the text box with the angles to be reached by the head | ||
* Click the button | * Click the button | ||
| Line 46: | Line 46: | ||
PLEASE BE AWARE THAT THE CMM WILL PERFORM A 2 AXIS MOVE!<br/> | PLEASE BE AWARE THAT THE CMM WILL PERFORM A 2 AXIS MOVE!<br/> | ||
Consider the space around the head in order to avoid collision.<b> | Consider the space around the head in order to avoid collision.<b> | ||
| + | |||
| + | Category Help On Line | ||
Revision as of 19:18, 1 September 2016
To Rotate the PH20 Head to a new Position there are two methods:
- By ARCO user interface
- By DMIS command
ARCO User Interface
- Set the CMM to CNC Mode
- Make sure the CAD Window is selected
- Open the Menu
CMM -> Make GOTOor


- Check the label for A and B angle in the PH20 Frame
- Fill the text box with the angles to be reached by the head
- Click the button

Make GOTO
PLEASE BE AWARE THAT THE CMM WILL PERFORM A 5 AXIS MOVE!
Consider the space around the head in order to avoid collision.
DMIS Command
With CMM in CNC Mode use one of the following DMIS Statement
- GOTO/HEADCS,AngB, AngA
Where
AngB: Angle B that the head will reach
AngA: Angle A that the head will reach
Example:
GOTO/HEADCS, 0.0, 0.0
- GOTO/VEC,i,j,k
Where
i: is the I component of the direction of the head after the rotation
j: is the J component of the direction of the head after the rotation
k: is the K component of the direction of the head after the rotation
Example:
GOTO/VEC, 1.0, 0.0, 0.0
- GOTO/PCS,rZ,rY,rZ
Where
rZ,rY,RZ are the DMIS Euler Transformation of the current reference system in order to have the Z axis pointing along the desired direction for the head.
Example:
GOTO/PCS,0.0000,90.0000,0.0000
PLEASE BE AWARE THAT THE CMM WILL PERFORM A 2 AXIS MOVE!
Consider the space around the head in order to avoid collision.<b>
Category Help On Line